成果简介:
国内飞机巡检主要依赖人工,智能化程度较低,缺乏国产飞机智能巡检机器人设备,飞机健康安全数据获取有限,且飞机数据译码技术和相关软件尚未成熟。此外,国内在关键部位故障诊断和预测性维护等关键技术上也显得不足,而飞机健康管理系统则被国外垄断,缺乏安全可控的自主平台。
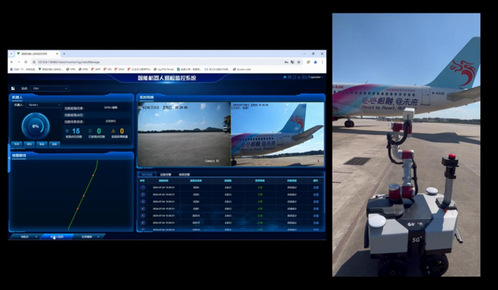
针对这些问题,项目研究大规模复杂动态场景的特征描述子构造与三维场景建模技术、面向环境多样化的大场景自主识别与高精度安全导航技术,研发结构功能一体化的飞机智能巡检机器人,利用深度学习实现对飞机蒙皮等关键部位缺陷智能检测。项目研究基于KafkatFlume 的高可靠、分布式的数据采集技术,实现飞机飞行参数和地面巡检数据空地双向采集,利用分布式计算技术,实现译码程序自主编程构建译码核心数据库FAP。项目研究基于数据标准化前馈神经网络飞机关键部位故障诊断技术,实现对飞机关键部位缺陷诊断,研究基于双分支并行结构的飞机关键部位预测性维护技术,实现对飞机维修维护的前置化。项目研究端边云协同感知的飞机健康安全智能巡检体系架构,研发面向飞机健康安全管理的监测平台,实现对飞机重要系统的监控,形成对飞机健康安全的物理检测与系统检测的示范应用。
该项目已在长龙(杭州)航空维修工程有限公司、青岛航空股份有限公司及多彩贵州航空有限公司推广应用。项目显著提高了飞机飞行安全,减少了飞行延误,节约了运行成本,助力环保,并打破了国外OEM垄断,为国产大飞机的数字化健康管理积累了宝贵经验。
成果应用:
该项目已在长龙(杭州)航空维修工程有限公司、青岛航空股份有限公司及多彩贵州航空有限公司推广应用。项目显著提高了飞机飞行安全,减少了飞行延误,节约了运行成本,助力环保,并打破了国外OEM垄断,为国产大飞机的数字化健康管理积累了宝贵经验。